
프로펠러 로봇카
Link
Contents
프로펠러 로봇카 실습 세부목차
2. 소프트웨어 프로그래밍
4. 더듬이센서로 주행하기
5. 초음파센서로 주행하기
6. 가시광선 탐색 주행하기
※ 본 페이지의 내용은 패럴렉스(Learn.Parallax.com)사의 공식 홈페이지에서 제공되는 자료를 참고하여 작성되었습니다.
본 자료의 원문을 참조하려면 프로펠러 C-프로그래밍 ActivityBot 홈페이지를 방문할 수 있습니다. 프로펠러 로봇카는 아두이노 로봇카와 달리 C-언어 문법을 사용합니다. C-언어에 익숙해지려는 목적이라면 이 자료를 조금 더 자세히 살펴보기 바랍니다.
그리고 아래 로봇카와 유사한 모델을 이미 가지고 계시다면 프로펠러 마이크로컨트롤러 보드를 준비해서 아래 실습들을 모두 따라할 수 있습니다. 물론 센서부품이 추가로 필요할 수 있습니다.
아래 세부 내용들을 살펴볼 수 있습니다.
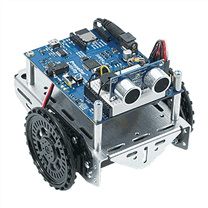
1) 프로펠러 로봇카 조립하기
2) 전기적 연결하기
프로펠러 마이크로컨트롤러에 대해서 궁금한 점이 있으면, 패럴렉스에서 제공하는 what is a microcontroller? 를 참고하기 바랍니다. 만약, 로봇카가 이미 조립되어 있다면, 전기 연결단계로 건너뛰기 바랍니다.
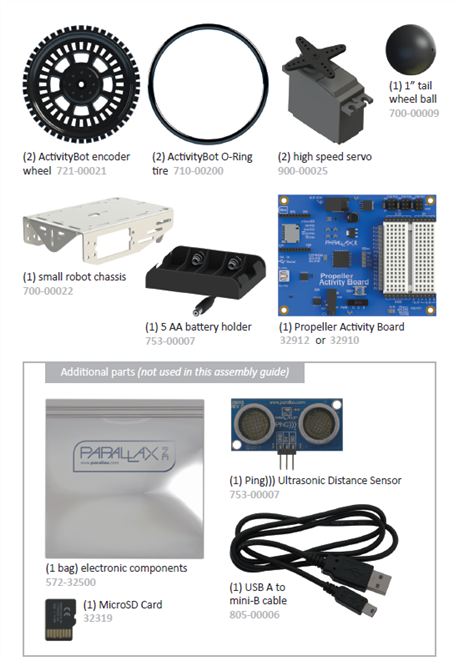
먼저 상품의 하드웨어 구성품을 확인하십시오.
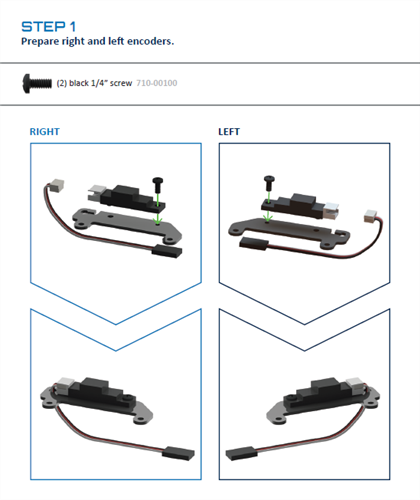
1단계: 인코더를 준비합니다.
2단계: 타이어를 준비합니다.

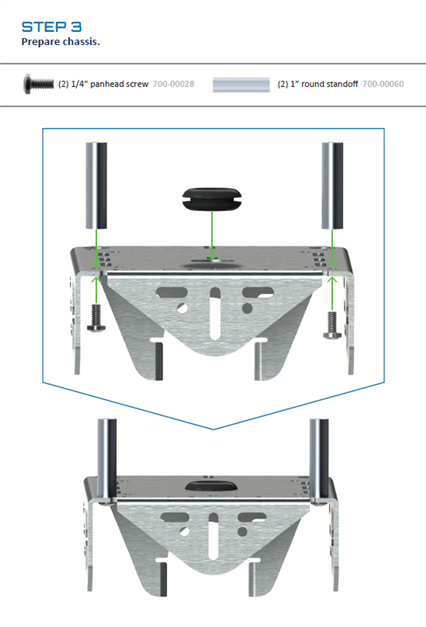
3단계: 로봇카 섀시를 준비합니다.
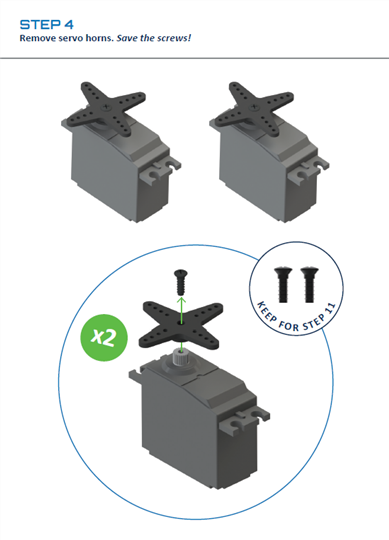
4단계: 서보모터를 준비합니다.
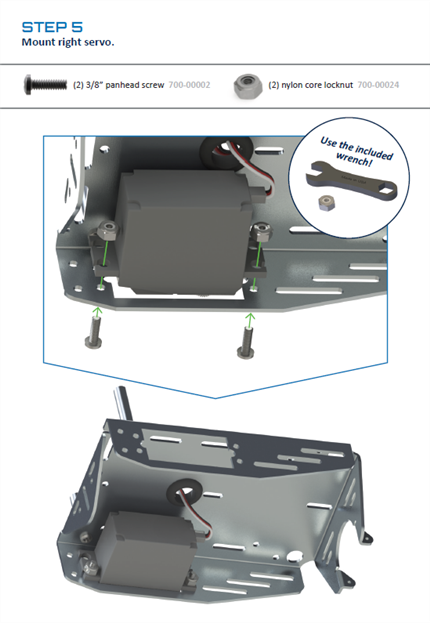
5단계: 오른쪽 서보모터를 로봇카에 설치합니다.
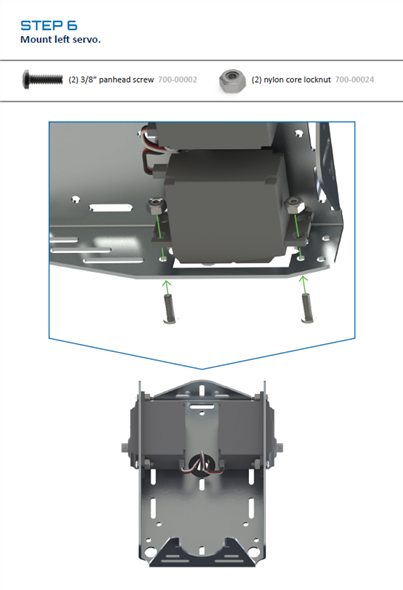
6단계: 왼쪽 서보모터를 로봇카에 설치합니다.
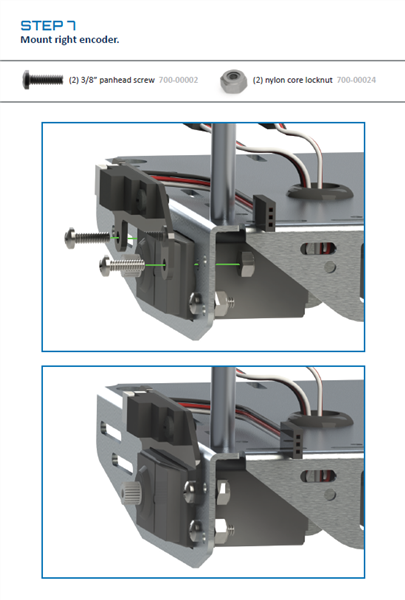
7단계: 오른쪽 엔코더 설치하기
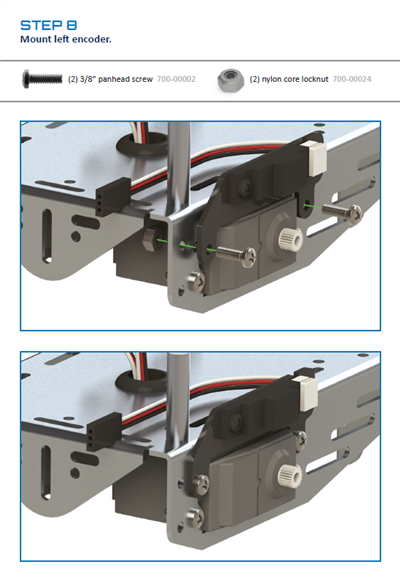
8단계: 왼쪽 엔코더 설치하기
9단계: 배터리 홀더 설치하기

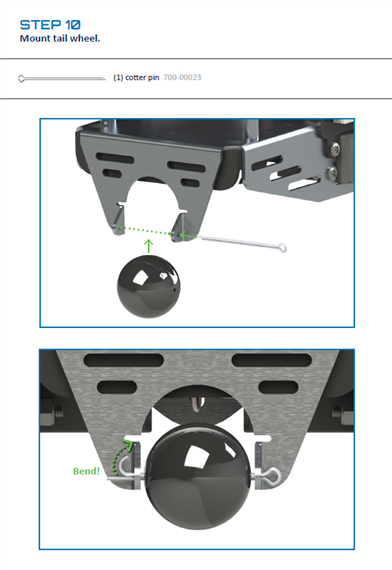
10단계: 꼬리 휠 설치하기
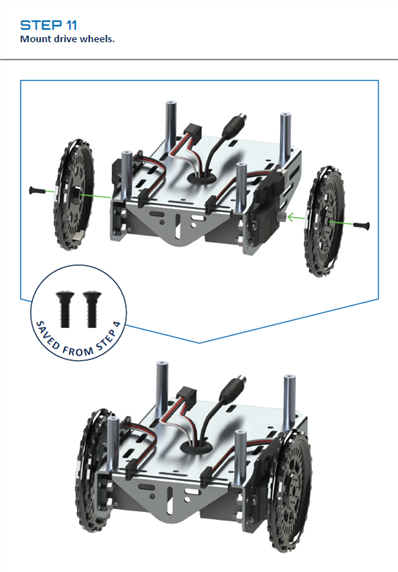
11단계: 양쪽 바퀴 설치하기
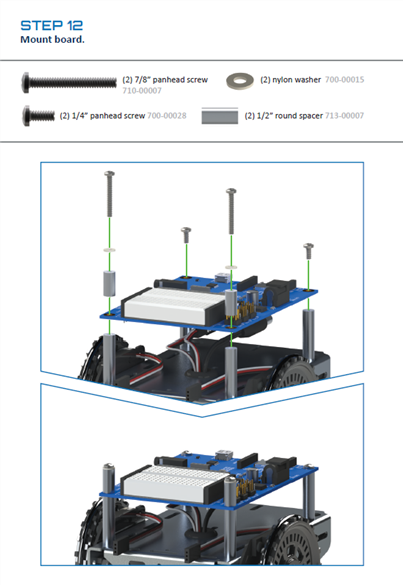
12단계: 로봇카 프로펠러 보드 설치하기
로봇카(ActivityBot) 전기적 연결에 필요한 구성품은 다음과 같습니다.
- 조립된 로봇
- (2) 20 k 옴 저항 (적 - 흑 - 주황색)
- (5) 1.5 V AA 배터리
- 니들 - 노즈 플라이어
- 마스킹 테이프
- 펜
참고: (5) 1.5 V AA 배터리를 사용해야합니다!
ActivityBot의 고속 연속 회전 서보는 정격 전압이 6 ~ 8 VDC입니다. 5 셀 홀더는 5 x 1.5 V = 7.5 V이기 때문에 5 개의 알칼라인 셀을 위해 설계되었습니다. 새로운 1.5 mA 알칼라인 배터리는 8.2 V까지 추가 할 수 있지만 0.2 V를 초과해서는 아무런 영향을 미치지 않습니다. 대체 공급 장치의 출력은 서보를 잠재적으로 손상시키지 않기 위해 대체 장치로 사용되기 전에 올바른 공급 범위에 속하는지 측정해서 확인해야 합니다.
케이블에 레이블을 붙이십시오.
- 각 엔코더 케이블 및 서보 케이블의 끝에 3 핀 소켓 근처에 마스킹 테이프 라벨을 부착하십시오.
- 각 케이블을 원래 위치로 추적하여 연결된 케이블을 확인하십시오.
- 각 케이블의 오른쪽 또는 왼쪽, 엔코더 또는 서보에 레이블을 붙이십시오.
서보 포트 준비
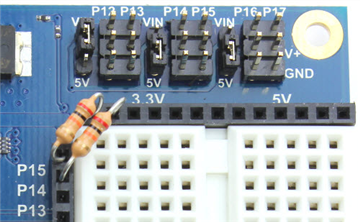
Propeller Activity Board (오리지널 또는 WX 버전) 상단의 3 핀 서보 포트 쌍마다 즉시 왼쪽에 있는 전원 선택 핀에 점퍼가 있습니다.
- 중요! 보드에 USB 케이블이나 배터리 팩 케이블이 연결되어 있지 않은지 확인하십시오. 전원이 연결되어있는 점퍼를 움직이면 보드가 손상 될 수 있습니다.
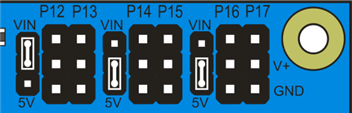
- 션트 점퍼를 아래 표시된 구성으로 이동하십시오. (점퍼에 약간의 탭이 없으면 바늘 코 펜치가 도움이 됩니다.)
P12 & P13 : VIN
P14 & P15 : 5V
P16 & P17, 5V
케이블을 연결하십시오.
엔코더 및 서보 케이블에는 흰색 - 빨간색 - 검정색 3 개의 와이어가 있습니다. 이 케이블을 서보 헤더에 꽂을 때는 보드 상단의 핀 레이블에 흰색 와이어를 맞추고 GND라는 줄에 검은 색 와이어를 맞추십시오.
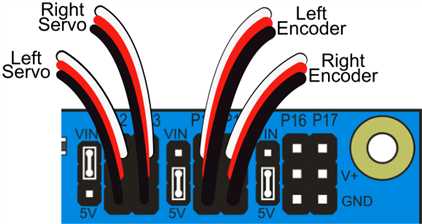
- 엔코더 케이블과 서보 케이블을 서보 포트에 꽂습니다.
P12 : 왼쪽 서보
P13 : 오른쪽 서보
P14 : 왼쪽 엔코더
P15 : 오른쪽 엔코더
저항 추가
- 20 k 옴 저항을 사용하여 브레드 보드 바로 위의 3.3 V 전원 소켓에 흰색 브레드 보드의 왼쪽에 있는 P14 및 P15 소켓을 연결하십시오.
연결을 다시 확인하십시오.
작업을 멈추고 각 연결을 지금 확인하십시오!
연결이 잘못되면 로봇카(ActivityBot)가 동작하지 않습니다. 나중에 문제를 해결하는 것보다 한번 더 확인하는 것이 더 쉽습니다.
- P12 & P13 서보 포트 션트 점퍼 - VIN으로 설정합니다.
- P14 & P15 : 서보 포트 션트 점퍼 - 5V로 설정.
- 왼쪽 서보 케이블 - P12 서보 포트.
- 오른쪽 서보 케이블 - P13 서보 포트.
- 왼쪽 엔코더 케이블 - P14 서보 포트.
- 오른쪽 엔코더 케이블 - P15 서보 포트.
- 모든 서보 및 엔코더 케이블 - 각 플러그는 서보 포트의 3 핀 모두에 있으며 보드가장자리에 가장 가까운 흰색 케이블이 있습니다.
- 왼쪽 엔코더 케이블 - 다른 쪽 끝이 엔코더 센서에 단단히 연결되어 있습니다.
- 오른쪽 엔코더 케이블 - 다른 쪽 끝이 엔코더 센서에 단단히 연결되어 있습니다.
- P14 소켓 - 20k 옴 저항 (적색 - 검은 색 주황색)이있는 3.3V 헤더에 연결.
- P15 소켓 - 20 k 옴 저항 (빨간색 - 검은 색 - 주황색)이있는 3.3V 헤더에 연결됩니다.
- 20k 옴 저항기 두 개를 모두 트리밍 한 경우, 리드가 소켓에 단단히 연결되어 전기 연결 상태가 양호한 지 확인하십시오.
배터리 삽입
- 5 개의 1.5 V AA 배터리를 배터리 팩에 넣으십시오.
- 배터리 팩의 배럴 플러그를 Propeller Activity Board (원래 또는 WX 버전) 배럴 잭에 꽂으십시오.
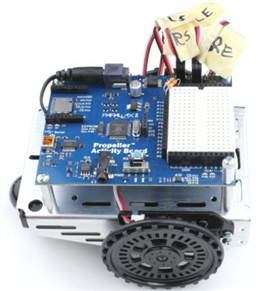
축하합니다. 이제 실습을 위한 로봇카 조립이 완료되었습니다!
이전 페이지로 다음 페이지로


