
브로클리프롭 로봇카 프로그래밍
Link
Contents
브로클리프롭 로봇카 프로그래밍 실습 세부목차
※ 본 페이지의 내용은 패럴렉스(Learn.Parallax.com)사의 공식 홈페이지에서 제공되는 자료를 참고하여 작성되었습니다.
7. 프로펠러 로봇카 문제해결
브로클리프롭(BlocklyProp) 프로그래밍 방법으로 프로펠러 로봇카를 이용하여 실습할 수 있습니다. 로봇카와 브로클리프롭(BlocklyProp) 비주얼 프로그래밍으로 로봇공학, 그래픽 프로그래밍, 전자 공학을 익혀 보십시오!
이 페이지는 프로펠러 로봇카를 다루는데 있어서 생길 수 있는 다양한 문제들을 해결하기 위한 도움을 드립니다.
로봇카에 문제가 있습니까?
이 페이지는 로봇카를 캘리브레이션하거나 처음으로 구동하도록 프로그래밍할 때 발생하는 가장 일반적인 문제 중 일부를 나열합니다.
- 로봇카 조정(calibration)작업은 일반적인 로봇카의 서보 모터 / 인코더 / 전원 연결 실수와 문제점을 찾을 수 있도록 도움을 줄 수 있는 진단프로그램이 있습니다. 아직 수행하지 않았다면 해당 프로그램의 지시사항을 따르십시오.
- 로봇카를 보정하는 Try 섹션의 테스트 프로그램에 실패한 후에 여기에 온 경우 터미널이 아래 목록에서 보고한 내용과 일치하는 "Details"를 찾은 다음 체크리스트 지침을 따르십시오.
- 지시 사항을 따르지만 동일한 메시지가 나타나면 기타 증상 섹션을 확인하십시오. 이 페이지 아래에서 부분적으로 시작합니다.
여기서 특별한 문제가 발견되지 않거나 더 많은 도움이 필요하면 프라이봇 카톡으로 질문하거나, 이메일(mail@fribot.com)로 질문할 수 있습니다.
또는 미국 패럴렉스 이메일 ( support@parallax.com ) 또는 전화 916-624-8333 로 질문하기 바랍ㄴ다. (수신자 부담 번호 : 미국 내에서만 888 99-STAMP)로 Parallax 기술 지원부에 문의하십시오 ). Learn Forum 에 커뮤니티의 도움을 얻을 수 있는 질문을 게시할 수도 있습니다.
로봇카 캘리브레이션 - 로봇카 디스플레이의 세부 정보 (캘리브레이션 결과)
아래의 메시지와 교정 결과의 세부 정보를 일치시킵니다.
배터리 메시지
교정 결과의 세부 정보에 다음 메시지 중 하나가 있는 경우 :
- 로봇카의 배터리가 너무 낮습니다. 5 개의 알카라인 배터리 세트를 새로 시험하거나 6.5 - 8V 전원 팩을 충전하십시오.
- 로봇카의 배터리가 방전되었거나 P13 / P12 PWR 선택 점퍼가 여전히 5V 설정 상태입니다. VIN 설정에 있어야합니다.
- 로봇카의 배터리가 실제로 방전되었거나 셀 중 하나가 배터리 홀더에 거꾸로 있습니다. 프로토 타이핑 영역에서 단락이 발생하면 느리게 움직이는 동작을 설명할 수 있습니다.
- 이런! 서보 속도는 로봇카의 전원 팩이 8.5V 이상일 수 있음을 나타냅니다. 서보 손상을 방지하려면 적절한 전원을 사용하십시오.
시도해 보세요!
- 중요 :이 옵션 중 하나를 사용하여 배터리를 조정한 후에는 로봇카 조정 작업을 반복해야합니다.
- 배터리가 너무 낮으면 새로운 알카라인 배터리 세트를 사용해보십시오.
- 배터리가 "... 죽은 것이거나 P13 / P12 PWR 선택이 여전히 5V 설정 ..."인 경우 먼저 P12 / P13 포트의 왼쪽에 있는 점퍼 탭을 확인하십시오. VIN으로 설정하는 방법에 대한 자세한 내용은 전기 연결 페이지로 이동하십시오. 점퍼 설정이 이미 올바르다면 새로운 알카라인 배터리 세트를 사용해보십시오.
- 배터리가 "완전히 소모되었거나 배터리 홀더의 셀 중 하나가 거꾸로 있습니다." 경우 셀을 검사하여 각 네거티브 터미널이 배터리 팩의 스프링에 연결되어 있는지 확인하십시오. 모든 셀이 정확하면 새로운 알카라인 배터리 세트를 사용해보십시오.
- 당신이 "이런!" 메시지에서 서보가 너무 빨리 선회한 것으로 측정되었는데, 이는 배터리 전압이 너무 높고 사양을 벗어났음을 나타냅니다.
스왑 케이블
교정 결과의 세부 정보에 다음 메시지가 있는 경우 :
로봇카의 서보 케이블 또는 인코더 케이블을 교체하십시오.
시도해 보세요!
- Test Encoder Connections 페이지로 이동하여 프로그램을 실행하십시오.
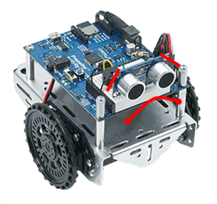
- 부드럽게 그림에 표시된 휠을 돌려서 깜박이는 표시등을 확인하십시오.
- P27 표시등이 깜박이면 서보 케이블이 서로 바뀝니다. 즉, P12에 연결된 케이블이 P13에 연결되고 그 반대의 경우도 마찬가지입니다.
- P12 및 P13 케이블의 플러그를 뽑습니다.
- P12에 연결된 케이블을 P13에 꽂고 P13에 연결했던 케이블을 P12에 연결합니다.
- P27 표시등이 깜박이면 엔코더 케이블이 서로 바뀝니다. 즉, P14에 연결된 케이블이 P15에 연결되고 그 반대의 경우도 마찬가지입니다.
- P14 및 P15 케이블의 플러그를 뽑습니다.
- P14에 연결된 케이블을 P15에 꽂고 P15에 연결된 케이블을 P14에 연결합니다.
- 이 문제를 해결한 후에는 로봇카 보정으로 돌아가서 보정 및 보정 테스트 프로그램을 다시 실행하십시오.
인코더 신호가 감지되지 않음
교정 결과의 세부 정보에 다음 메시지 중 하나가 있는 경우 :
프로펠러는 로봇카의 엔코더 신호를 감지 할 수 없습니다.
프로펠러는 로봇카의 오른쪽 엔코더 신호를 감지 할 수 없습니다.
프로펠러는 로봇카의 왼쪽 엔코더 신호를 감지 할 수 없습니다.
시도해 보세요!
- 인코더 준비 페이지로 이동하십시오. 케이블이 어떻게 연결되어 있는지 확인하십시오. 케이블이 인코더에 단단히 연결되어 있는지 확인하십시오.
(이 경우에는 로봇카를 분리할 필요가 없습니다. 인코더 센서에 인코더 플러그를 단단히 누르십시오).
- 전기 연결 페이지로 이동하여 각 명령이 올바르게 완료되었는지 확인하십시오.
- Test Encoder Connections 페이지로 이동하여 프로그램을 실행하고 해당 페이지의 지침을 주의해서 따르십시오.
- 이 문제를 해결 한 후에는 로봇카 보정으로 돌아가서 보정 및 보정 테스트 프로그램을 다시 실행하십시오.
서보의 기계적 캘리브레이션 필요
교정 결과의 세부 정보에 다음 메시지 중 하나가 있는 경우 :
로봇카 양쪽의 서보는 기계적 보정이 필요합니다.
로봇카의 왼쪽에 있는 서보는 기계적 보정이 필요합니다.
로봇카의 오른쪽에 있는 서보는 기계적 보정이 필요합니다.
시도해 보세요!
1/8 "(3.18 mm) 이하의 샤프트가 있는 Phillips # 1 포인트 드라이버가 필요합니다.

- 로봇카의 전원 스위치를 0 으로 설정하십시오.
- 로봇카의 배터리 팩에서 배터리를 제거하십시오.
- 배터리 팩을 풀고 섀시에서 분리하여 드라이버를 액세스 구멍에 접근시켜 서보를 조절하십시오.
- 배터리를 다시 배터리 팩에 넣고 로봇카 보드에 연결되어 있는지 확인하십시오.
- 로봇카 보드의 전원스위치를 2로 설정하여 서보에 전원을 공급하십시오. 보드의 3 접점스위치 선택 위치가 2로 설정되어 서보 포트에 전원 공급
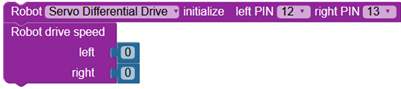
- 로드 & 실행 (EEPROM에 코드 저장) 버튼을 사용하여 브로클리프롭(BlocklyProp) 프로그램을 실행하십시오. 세부 구역에 보고된 휠이 매우 빠르게 회전해야 합니다.
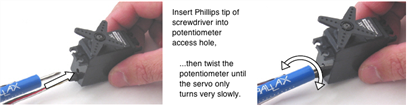
- 스크루 드라이버를 사용하여 아래 그림과 같이 서보의 전위차계를 부드럽게 조정하십시오. 너무 세게 누르지 마십시오! 서보 턴을 매우 천천히 하는 설정을 찾을 때까지 (최대 회전 당 4 초 이상) 전위차계를 약간 조정하십시오.
- 배터리 팩을 섀시에 다시 부착하십시오.
- 이 문제를 해결 한 후에는 로봇카 보정으로 돌아가서 보정 및 보정 테스트 프로그램을 다시 실행하십시오.
기타 증상들
증상 : 로봇카가 켜져 있고 새 배터리로 전원이 공급되고 있지만 전혀 움직이지 않거나 천천히 움직입니다.
이것을 시도하십시오 : 첫째, 서보가 전혀 돌아가지 않으면, 위치 1이 아닌 전원 스위치가 위치 2 (서보 헤더에 전원을 공급)에 있는지 확인하십시오. 도움이 되지 않으면 서보 포트 점퍼 위치를 확인하십시오. P12와 P13의 점퍼는 VIN으로 설정해야 합니다. 5V로 설정하면 서보가 충분한 전력을 받지 못합니다. 점퍼를 변경하고, 캘리브레이션을 다시 실행하십시오.
주의: 전원 플러그 또는 USB 케이블이 보드에 연결되어 있는 동안에는 점퍼를 움직이지 마십시오.
증상 : 3 포지션 스위치가 1 위치에 있을 때 로봇카의 서보 및 인코더에 전원이 공급됩니다.
이것을 시도하십시오 : 잠재적으로 단락 회로가 로봇카 보드 (원래 또는 WX 버전)를 손상시켰습니다. 3 접점 스위치의 위치 1은 서보 및 인코더가 연결된 브레드 보드 위에 3 핀 헤더에 전원을 공급해서는 안됩니다. 이 문제는 Activity 보드 (원래 또는 WX 버전)가 USB 포트 또는 배럴 잭에서 전원을 공급받는 동안 P12 및 P13의 션트 점퍼가 이동된 경우에 종종 발생할 수 있습니다. 불행하게도 이 문제가 발생하면 해결 방법이 없습니다. 구입처에 문의하십시오 (이 페이지 상단의 연락처 정보 참조).
증상 : 로봇카가 USB 케이블을 통해 컴퓨터에 연결되면 COM 포트가 등록되지 않고 컴퓨터가 오류를 표시합니다 (보드가 감지되지 않거나 보드가 제대로 작동하지 않을 수 있음).
이것을 시도하십시오 : Activity 보드(본래 또는 WX 버전)에 연결된 USB를 검사하십시오. 로봇카의 USB 연결 포트는 Mini B 커넥터에 단단히 고정되어 있습니다. 안전하다고 느껴질지라도 케이블이 포트에 완전히 삽입되지 않을 수 있으며 이로 인해 컴퓨터가 연결을 인식하지 못하거나 오류가 발생합니다.
증상 : 로봇카가 프로그램된 것과 반대 방향으로 이동합니다.
시도해 보세요:
이것은 서보와 엔코더 케이블이 바뀌었음을 의미합니다. P14와 P15의 플러그를 뽑고 P14에 꽂은 P15에 케이블을 연결하십시오. 또한 P12 및 P13 케이블의 플러그를 뽑고 P13에 꽂은 케이블을 P12에 꽂거나 그 반대의 경우도 연결하십시오. 왼쪽과 오른쪽 연결이 전기 연결 페이지 지침과 일치하는지 확인한 다음 다시 조정을 실행하십시오. 흔히 범하는 실수는 왼쪽 및 오른쪽 서보의 케이블을 우발적으로 전환하는 것입니다. 그러면 로봇카가 앞으로 가야할 때 뒤로 가고 오른쪽으로 가야할 때 왼쪽으로 이동합니다.
문제 : 로봇카 보정 루틴은 정상적으로 진행되었지만 곧바로 운전하는 대신 물결이 일그러지고 물결 모양으로 나타납니다.
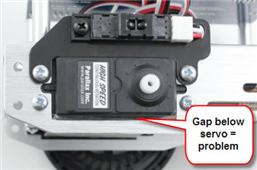
해결책 : 서보 또는 서보 브래킷을 조정해야 할 수 있습니다. 섀시의 구멍 안에 있는 서보의 위치를 확인하십시오.
서보 주변에는 약간의 공간이 있습니다. 서보가 서보 아래에 틈을 두고 엔코더에 가까운 구멍의 상단 가장자리에 꽉 조여져 있으면 엔코더 센서에서 나오는 적외선 광선이 바퀴 쐐기를 잃어 버려 대신 아래에 있는 실선에 닿을 수 있습니다.
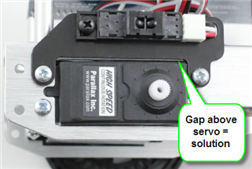
이 문제를 해결하려면 서보의 잠금 너트를 느슨하게한 다음 서보와 서보의 간격을 조정하십시오. 이렇게 하면 인코더가 스포크와 구멍만 보도록 해야합니다. 잠금 너트를 다시 조일 때 서보가 위치를 바꾸지 않았는지 확인하십시오.
(참고 :이 문제를 완화하기 위해 2013 년 10 월에 인코더 브래킷이 다시 설계되었습니다.)


